
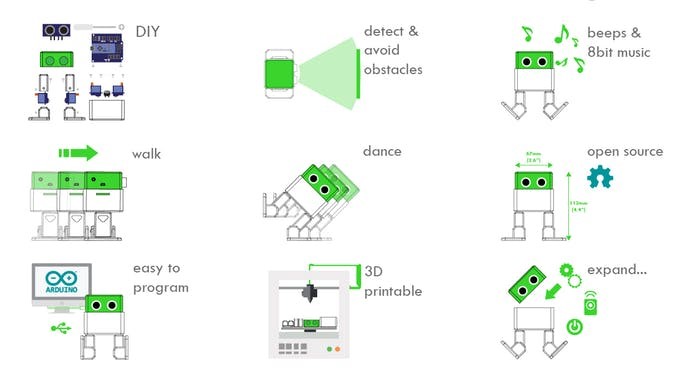
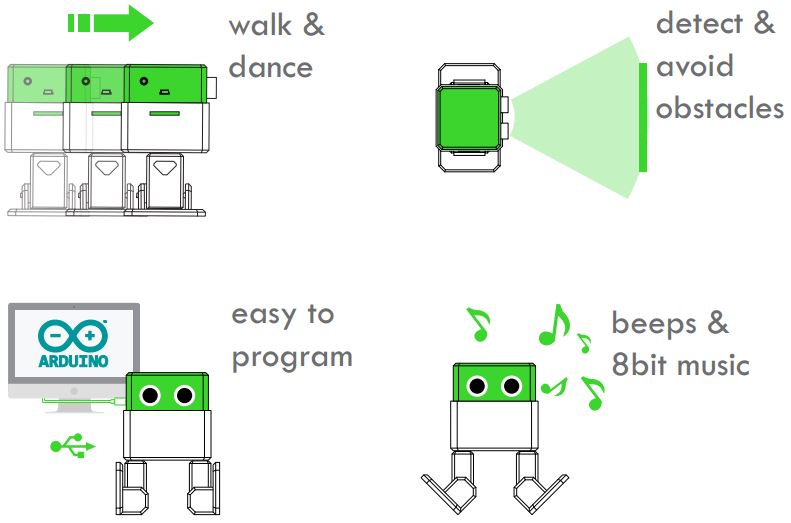
این ربات یک نسخه منبع باز و رایگان بوده که اجزای آن با قابلیت پرینت سه بعدی شدن قابل ساخت است و با بردهای آردوینو کاملا سازگاری دارد. همچنین, از آنجایی که تمام حرکات این ربات را خودتان برنامه نویسی می کنید یک ارتباط دوستانه و صمیمی به کاربر می دهد و از آن جهت این ربات خیلی منحصر به فرد شده است.
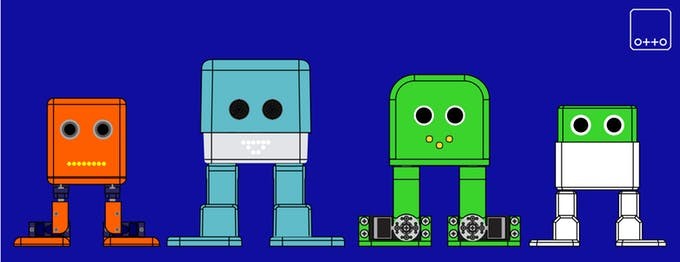
ربات Otto در واقع از ربات دیگری به نام Bob Biped الهام گرفته شده است و با کدهای منبع باز و رایگان ربات دیگری به نام Zowi برنامه نویسی می شود. در واقع, سیر تکاملی این ربات به صورت شکل زیر از سمت چپ به راست با Bob Biped و سپس Zowi و Tito شروع شده و به Otto تکمیل می شود.
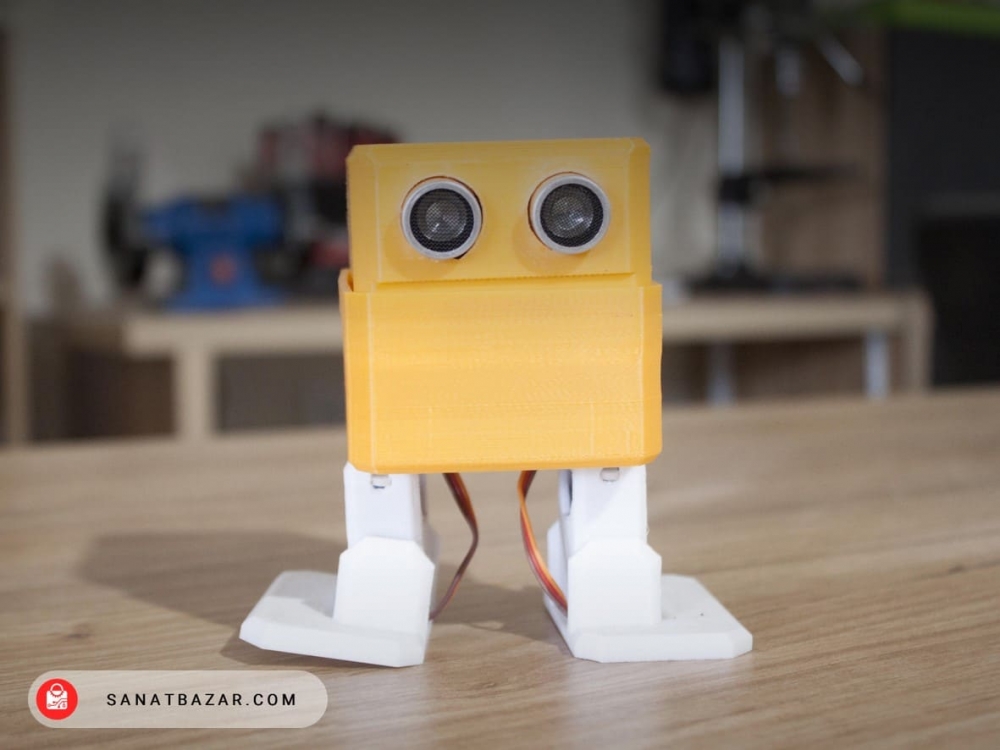
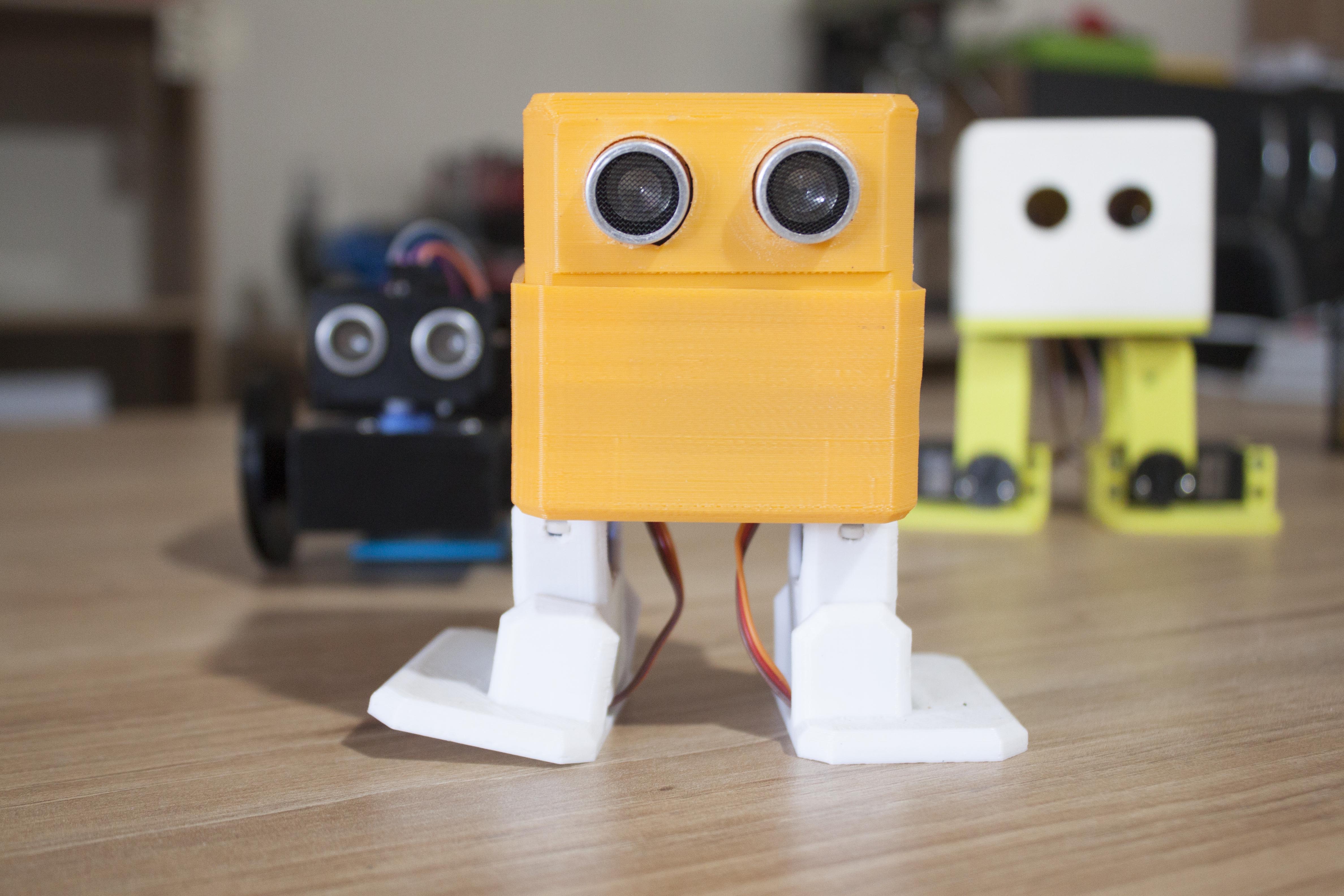
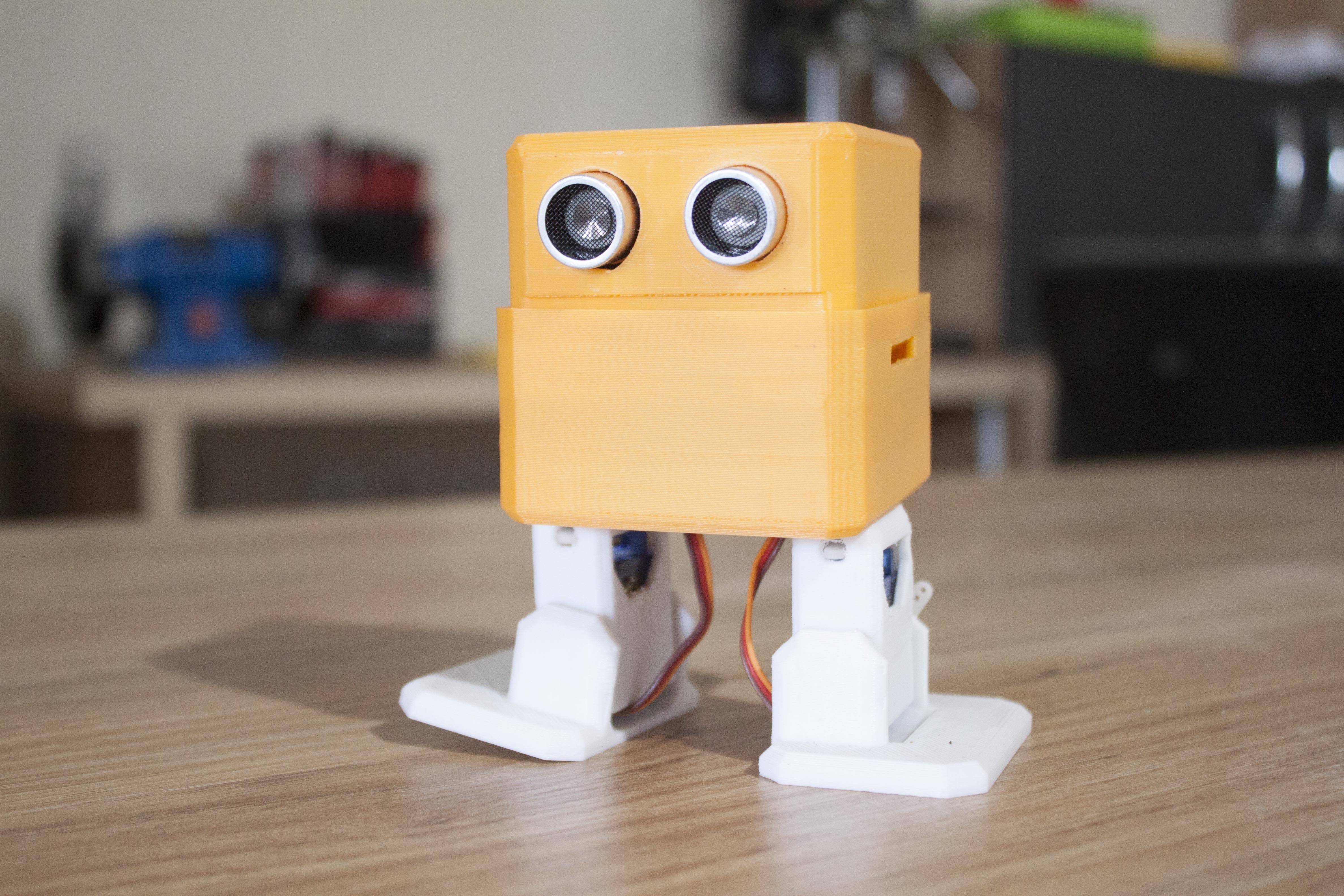
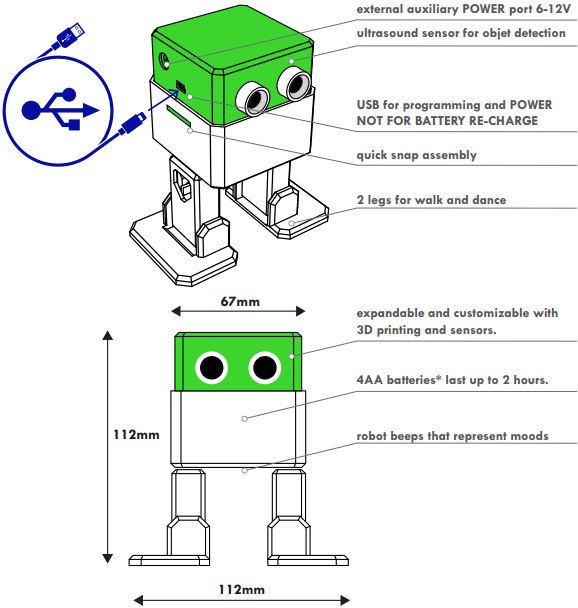
تفاوت ربات Otto با سایرین در اندازه نهایی مونتاژ شده آن (11cm*7cm*12cm) و مونتاژ قطعات راحت تر و چهره زیبا و متفاوت تر آن است. با استفاده از قطعات پرینت سه بعدی شده, اتصالات الکترونیکی ساده و مهارت های ساده و پایه ای برنامه نویسی شما قادر خواهید بود تا دوست خود ربات Otto زیبا را در مدت یک ساعت و حتی کمتر بسازید.
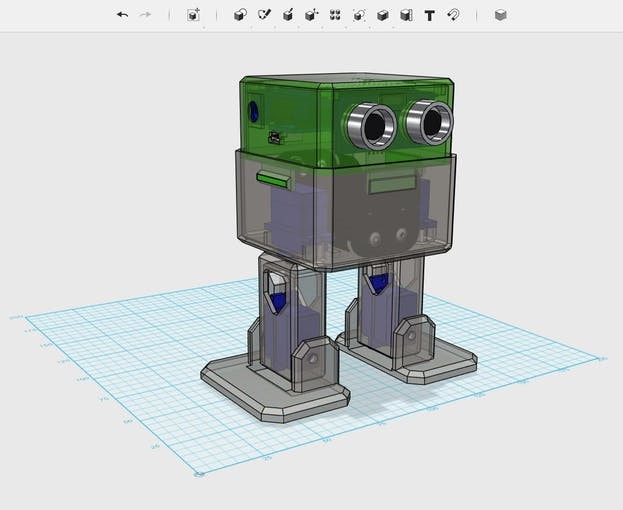
در طراحی این ربات از نرم افزار Autodesk 123D استفاده شده است که البته شما با استفاده از سایر نرم افزارهای طراحی سه بعدی میتوانید در طراحی آن تغییرات مد نظرتان را ایجاد کنید.
تمرکز این آموزش گام به گام بر روی ساخت نمونه ساده Otto DIY بوده که البته ربات های پیشرفته تری از این دسته همچون ربات Otto DIY+ هم وجود دارند.
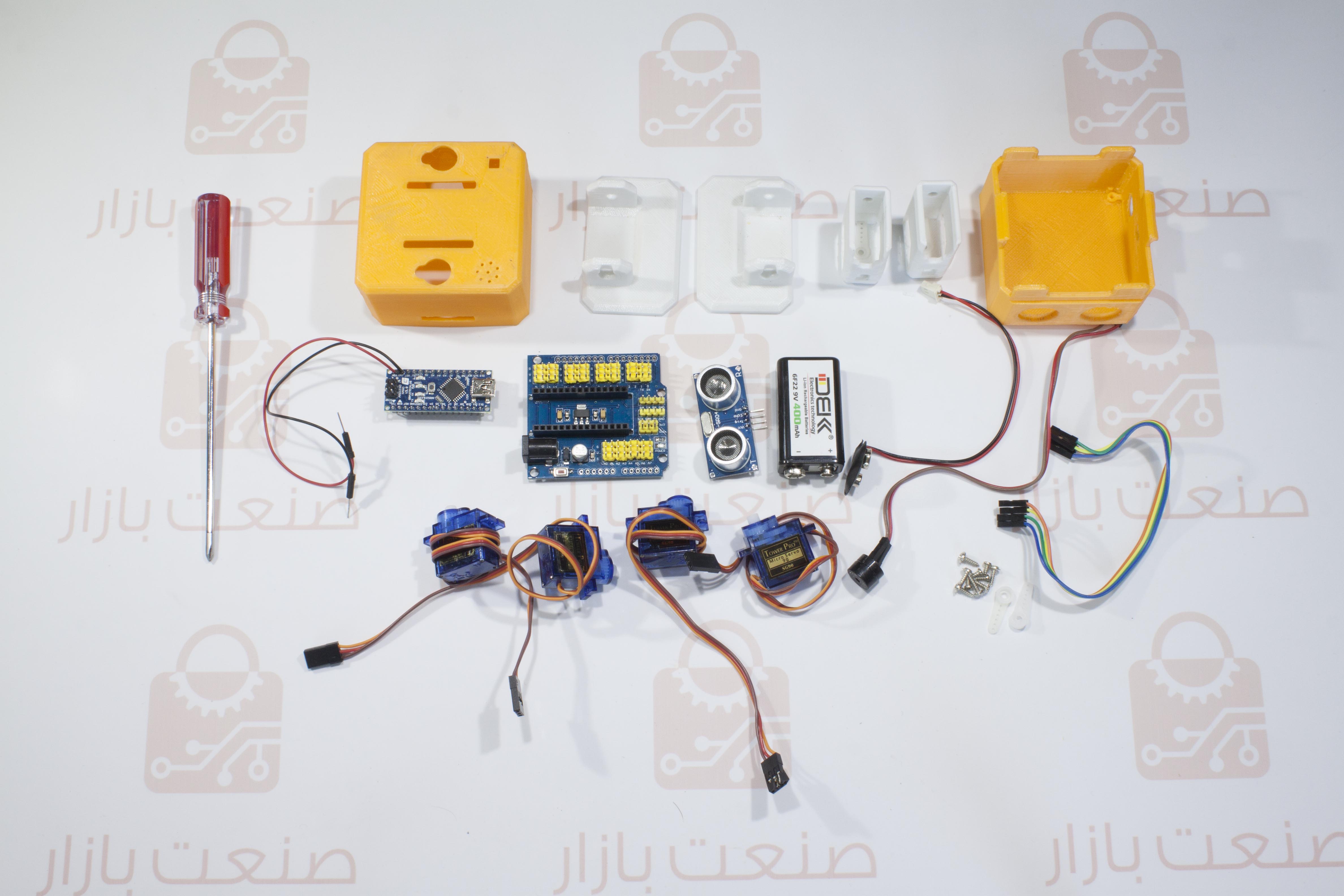
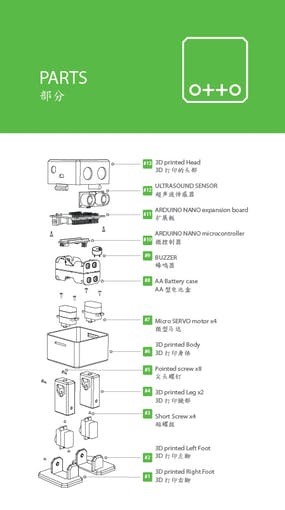
گام اول: جمع آوری تمامی قطعات مورد نیاز
تمامی قطعات مورد نیاز برای ساخت این ربات را طبق فهرست ارائه شده و مانند شکل جمع آوری کنید. از مینی برد بورد هم به عنوان گزینه دیگر به جای شیلد آردوینو نانو برای راه اندازی ربات میتوانید استفاده کنید که البته زمان بیشتری نیاز داشته و سیم کشی سخت تری دارد. بنابراین, فقط کافی است تا 6 قطعه را پرینت سه بعدی کنید و وارد گام بعدی ساخت این ربات جذاب شوید.
1 عدد پرینت سه بعدی سر ربات
1 عدد پرینت سه بعدی بدنه آن
2 عدد پرینت سه بعدی پاها
1 عدد پرینت سه بعدی کف پای راست
1 عدد پرینت سه بعدی کف پای چپ
قطعات الکترونیک مورد نیاز:
|
سنسور تشخیص فاصله آلتراسونیک HC-SR04 |
1 عدد | |
| شیلد برد آردوینو نانو | 1 عدد | |
| برد آردوینو نانو | 1 عدد | |
| (Buzzer) زنگ اخبار | 1 عدد | |
| جاباتری قلمی 2 تایی یا باتری کتابی | 2 عدد | |
| کابل اتصال به باتری | 1 عدد | |
| سروو موتور SG90 | 4 عدد |
به ابزاری مثل کاتر برای صاف کردن قسمت هایی از قطعات پرینت سه بعدی شده که کیفیت پایینی ممکن است داشته باشند و نیاز به صاف کردن آنها هست ممکن است احتیج پیدا کنید. همچنین, اگر می خواهید ربات را با باتری راه اندازی کنید نیاز دارید تا سیم های جا باتری را به برد لحیم کنید و درنتیجه به سیم لحیم و هویه هم نیاز پیدا خواهید کرد. هرچند, می توان به طور مستقیم هم ربات را با کابل USB برد آردوینو نانو راه اندازی نمود.
در نتیجه, فقط کافی است تا تمامی فایل های .stl را دانلود کرده و آنها را با پرینتر سه بعدی پرینت کنید. اگر پرینتر سه بعدی در اختیار ندارید می توانید در همین سایت و در قسمت فروشکاه در زیر مجموعه خدمات ساخت و نمونه سازی در منوی "خدمات پرینت سه بعدی" فایل های خود را برای پرینت کردن ارائه دهید.
اگر سفارش تک تک قطعات برای خرید دشوار است, در "کیت کامل ساخت ربات Otto" می توانید تمامی قطعات را سفارش و خریداری کنید.
تمام چیزی که برای پرینت سه بعدی و برنامه نویسی این ربات لازم است را می توانید در فایل zip پیوست پیدا کنید. کافیست فقط آن را دانلود کرده و extract کنید.
گام دوم: تنظیمات پرینتر سه بعدی
ربات Otto به خوبی برای چاپ سه بعدی طراحی شده است، فایلهایی که شما دانلود کرده اید، کاملا واضح بوده و به خوبی برای پرینت سه بعدی طراحی شده اند، بنابراین اگر فقط به چند نکته زیر به خوبی دقت کنید, برای پرینت کردن قطعات به مشکلی بر نخواهید خورد.
- در فرایند پرینت سه بعدی نیاز به هیچ Support یا Raft نیست.
- رزولوشن را برابر 0.15 در نظر بگیرید.
- Fill density را هم برابر 20 درصد تنظیم کنید.
برای پرینت کردن, برای مجزا کردن رنگ هر قطعه می توانید آنها را به صورت جداگانه پرینت کنید و یا اینکه اگر میخواهید تمامی قطعات با هم پرینت شود فقط به یک فضای 14cm*14cm نیاز خواهید داشت. بعد از پرینت کردن قطعات نیاز به کمی تمیز کاری و صاف کردن قطعات مربوط به پاها و کف پاها است که محل ثابت کردن موتورهای ربات است.
گام سوم: بررسی قطعات از پایین به بالای ربات
همانطور که در گام دوم بیان شد، موتورهای سروو موتور با 3 پیچ در تصویر در حال حاضر گنجانده شده و می توانید ترتیب قطعات را در تصویر زیر مشاهده کنید.
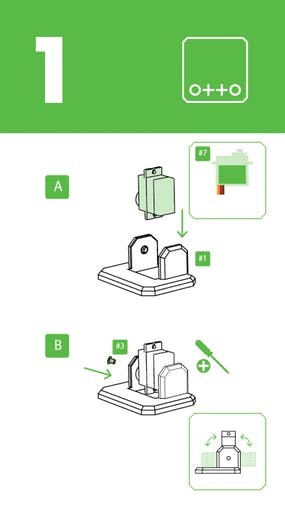
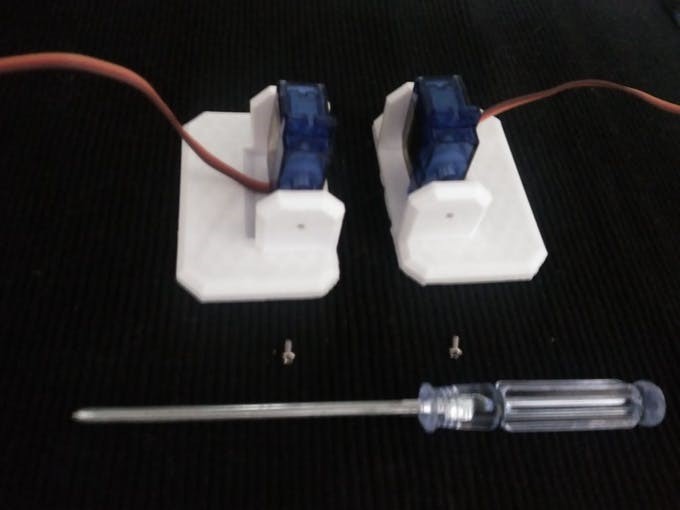
گام چهارم: مونتاژ سروو موتورهای پاها
سروو موتور را داخل کف پای پرینت شده قرار داده و به سمت پایین فشار دهید. توجه شود که خیلی به آن فشار وارد نشود و اگر به سختی این کار انجام می شود نیاز دارد تا با کاتر اندکی بیشتر محل را تمیز کنید. حتما مطمئن شوید که سروو موتور قابلیت چرخش 90 درجه در هر سمت را داشته باشد و از درجه آزادی آن کاسته نشده باشد. وقتی این مسئله را بررسی کردید می توانید پیچ مربوط با ثابت کردن سروو موتور را ببندید.
همین پروسه را برای کف پای بعدی ربات نیز تکرار کنید.
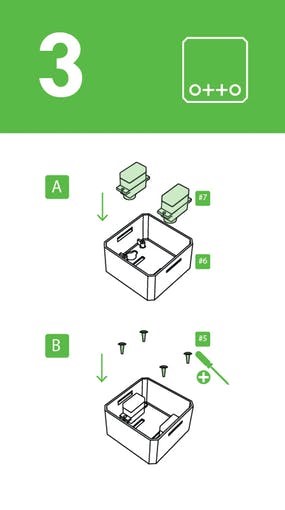
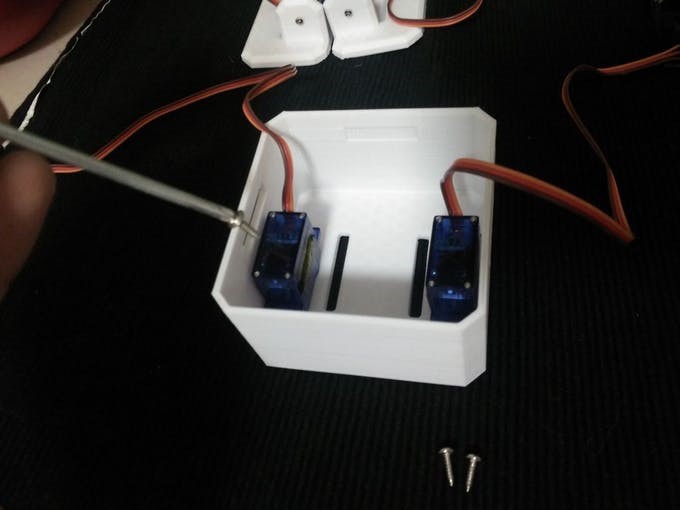
گام پنجم: ثابت کردن سروو موتورهای بدنه
دو سروو موتور بعدی را با پیچهای مخصوص خود به بدنه پرینت سه بعدی شده ربات و در محل مخصوص خودشان ثابت کنید.
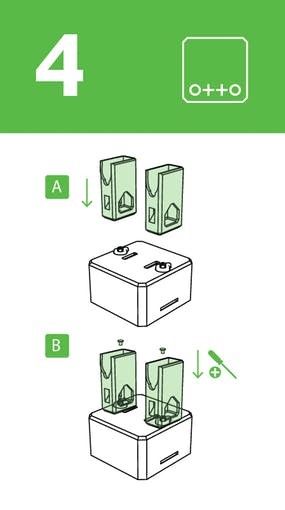
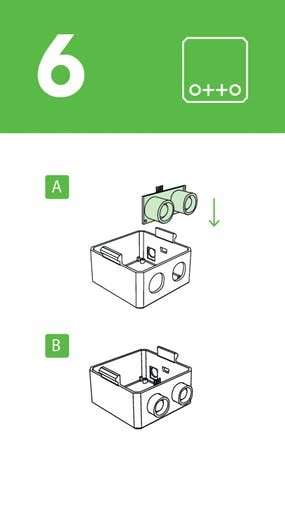
گام ششم: ثابت کردن پاها به بدنه ربات
پاهای ربات را به محفظه بدنه ربات و بر روی سروو موتورها متصل کنید. دوباره در این گام هم بررسی کنید که حتما هر سروو توانایی چرخش 90 درجه در هر سمت را داشته باشد و بعد از اطمینان از آن پیچ مربوط به اتصال سروو موتور به محل تعبیه شده بر روی پاها را ببندید.
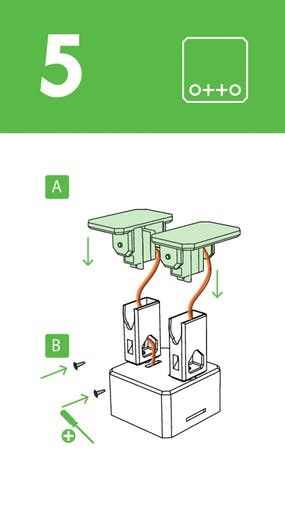
گام هفتم: ثابت کردن کف پاها به پاها در ربات
حال در این گام باید کف پاها را به بدنه پاهای ربات متصل کنید. توجه کنید که طبق شکل و دستورالعملی که دانلود کرده اید عمل کرده و سیم سروو موتورها را از حفره ایجاد شده در پاها و شیار ایجاد شده در قطعه بدنه ربات عبور دهید و سپس کف پاها را با پیچ به پاها ثابت نمایید.

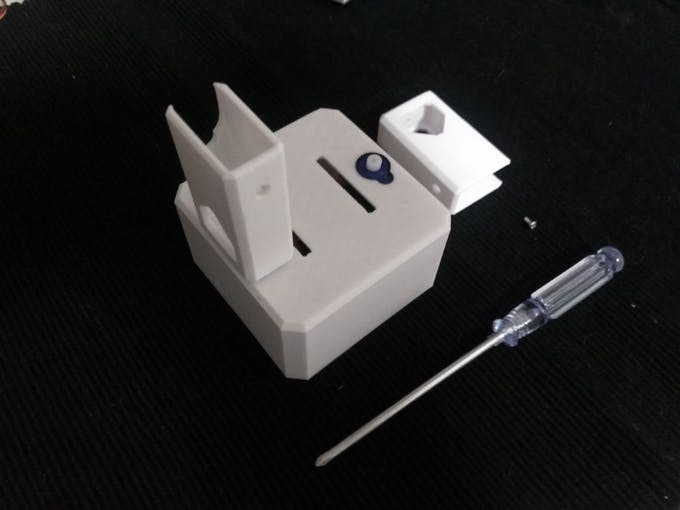
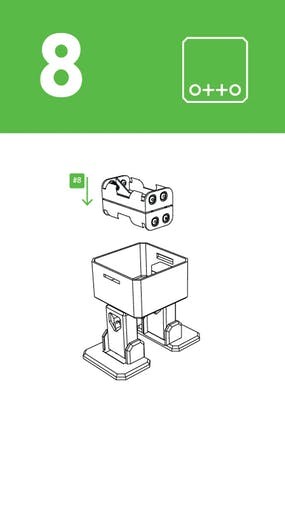
گام هشتم: مونتاژ سر ربات
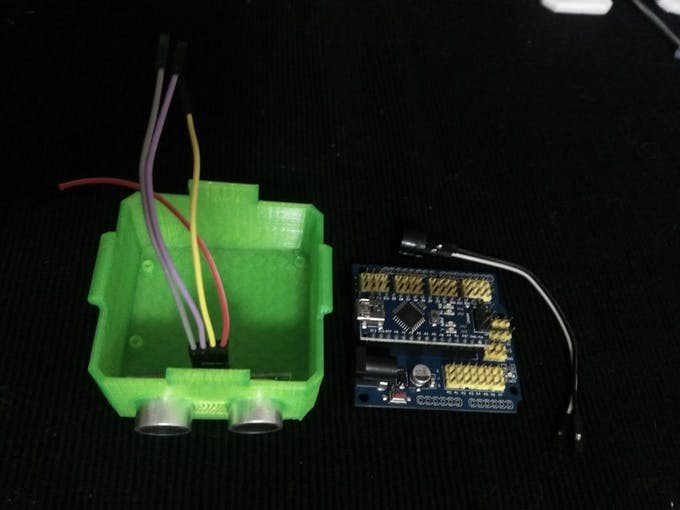
برای مونتاژ سر, کار را با ماژول التراسونیک آغاز کنید و چشم های ربات را به بیرون سر آن هدایت کنید.
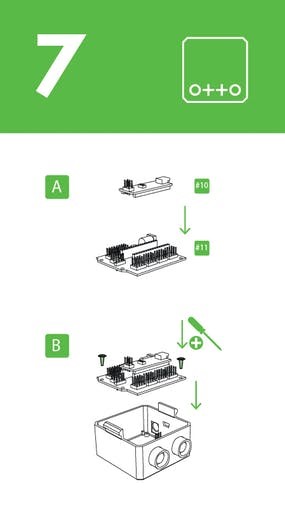
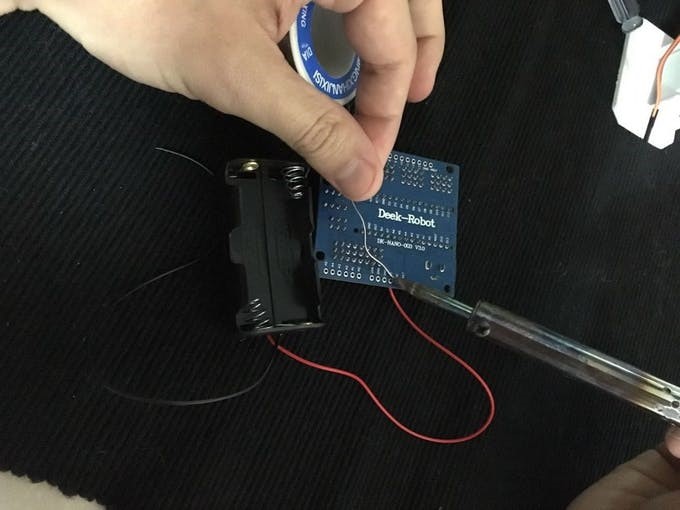
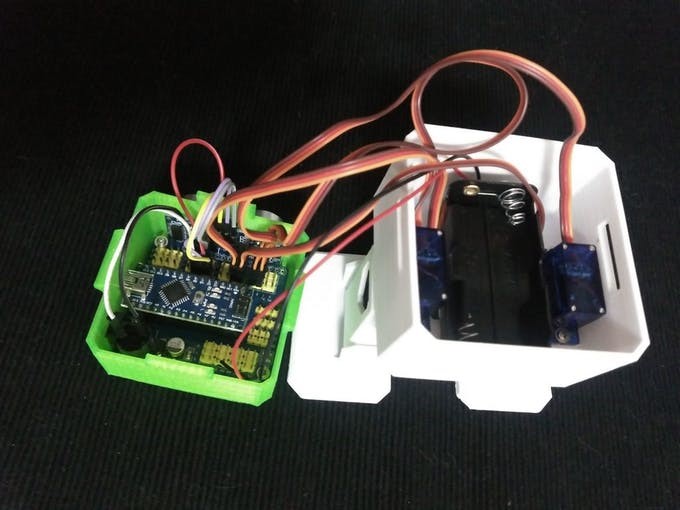
حال بعد از قرار دادن برد آردوینو نانو بر روی شیلد آن, اگر مایل باشید می توانید سیم مثبت جعبه باتری را به پایه Vcc آردوینو و سیم منفی آن را هم به یکی از پین های GND برد لحیم کنید. حال, هر دو برد را درون قطعه سر ربات قرار دهید به نحوی که سمت پورت USB برد در محل تعبیه شده آن بر روی سر ربات قرار بگیرد و به دو پیچ آن را به سر ربات ثابت کنید. در نهایت هم دو جعبه باتری دوتایی را در بدنه ربات و بین دو سروو موتور روی بدنه قرار دهید.
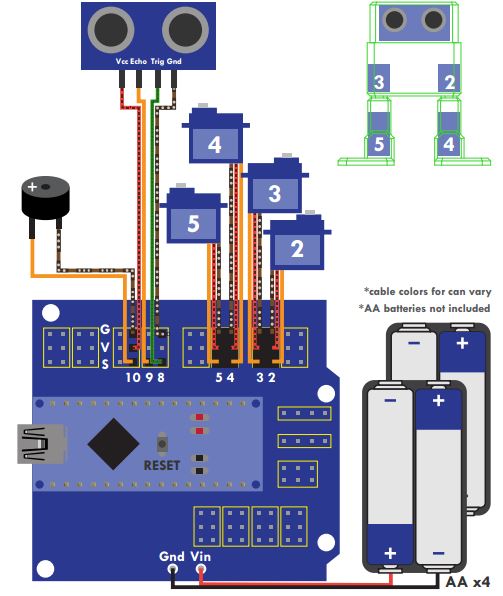
گام نهم: اتصالات الکترونیکی
طبق شکل و دستورالعمل ارائه شده و با استفاده از سیم های جامپر مادگی به مادگی زنگ اخبار و شیلد و آردوینو را متصل کنید و موتورهای سروو را نیز به پین های مربوطه از شیلد آردوینو نانو وصل کنید. توجه شود که به جای شیلد آردوینو نانو می توان از مینی برد بورد هم استفاده کرد که نحوه اتصالات آن در دستورالعمل به طور کامل آورده شده است.
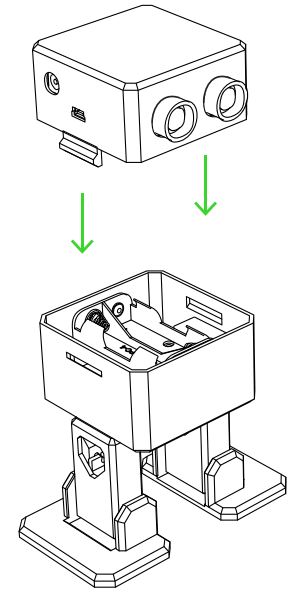
گام دهم: اتصال سر ربات به بدنه و بارگذاری کد آردوینو
سر ربات را چرخانده و بر روی بدنه آن قرار داهید و دقت کنید که همه کابل ها با احتیاط داخل فضای بین سر و بدنه قرار بگیرند.
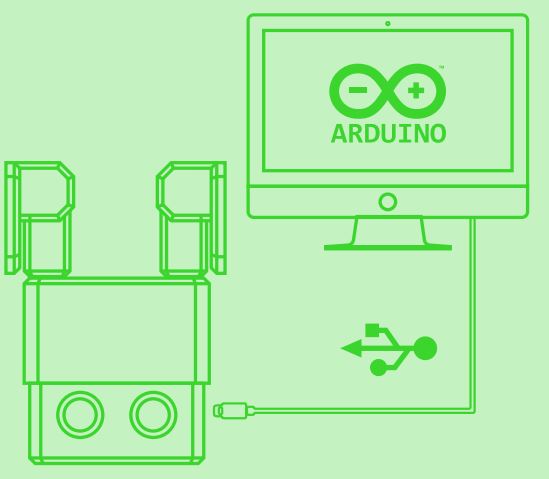
برای قسمت برنامه نویسی مجموعه, کافی است تا:
- نرم افزار آردوینو را بر روی کامپیوتر خود نصب کنید.
- ربات Otto خود را با کابل USB آن به کامپیوتر وصل کنید.
- کتابخانه Ocillator را در قسمت کتابخانه های آردوینو برده و extract نمایید.
- در نهایت برنامه ino را در محیط IDE نرم افزار باز کرده و بر روی برد آردوینو نانو خود بارگذاری کنید و ربات شما شروع به رقصیدن خواهد کرد.
به همین ترتیب می توانید از سایر برنامه های نوشته شده برای ربات مانند برنامه Otto_avoid.ino و مشابه آن هم استفاده کنید و عملکرد ربات خود را مشاهده نمایید. همچنین, می توانید برنامه های دیگری را خودتان برای ربات بنویسید و یا برنامه های موجود را ارتقاء دهید و با ما و دیگران به اشتراک بگذارید.
امیدواریم ربات Otto خود را به راحتی بسازید و از کار با آن لذت ببرید. فیلم ها و عکس های ربات خود را با ما در اشتراک بگذارید و هر سوالی در رابطه با ساخت ربات و انتقادات و پیشنهادات خود را با ما در میان بگذارید..
فیلم آموزش ساخت ربات کوچک otto
نظرات، پيشنهادات و انتقادات خود را براي بهتر شدن محتواي مطالب با ما در ميان بگذاريد...





نظرات (17)