

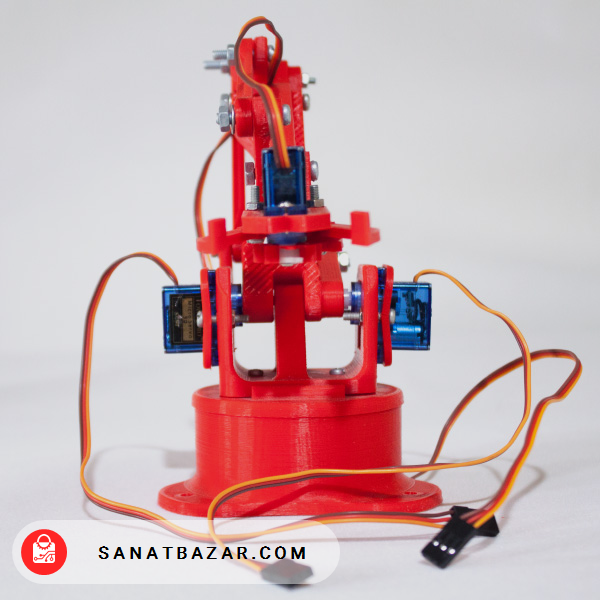
این ربات که در این آموزش قرار است با ساخت و کنترل آن آشنا شویم با قطعات پرینتر سه بعدی شده از جنس ABS ساخته شده و به راحتی و با انواع روشها قابلیت کنترل شدن دارد. در این ربات از عملگرها یا اکچویتورهایی با عنوان سروو موتورها استفاده شده است که برای کنترل آنها می توانید از پتانسیومترها، جویاستیکها، کنترل از راه دور و روش های متنوع دیگر استفاده کنید. در ادامه به ساخت این ربات پرداخته میشود.
قطعات مورد نیاز
|
سنسور تشخیص فاصله آلتراسونیک HC-SR04 |
1 عدد | |
| ماژول بلوتوث سریال پورت - serial bluetooth HC-06 | 1 عدد | |
| برد آردوینو uno | 1 عدد | |
| سیم اتصال به برد بورد 65 تایی | 1 عدد | |
| سروو موتور SG90 | 4 عدد | |
| پیچ M3*12 | 10 عدد | |
| پیچ M3*20 | 5 عدد | |
| پیچ M3*30 | 2 عدد | |
| پیچ M3*26 | 1 عدد | |
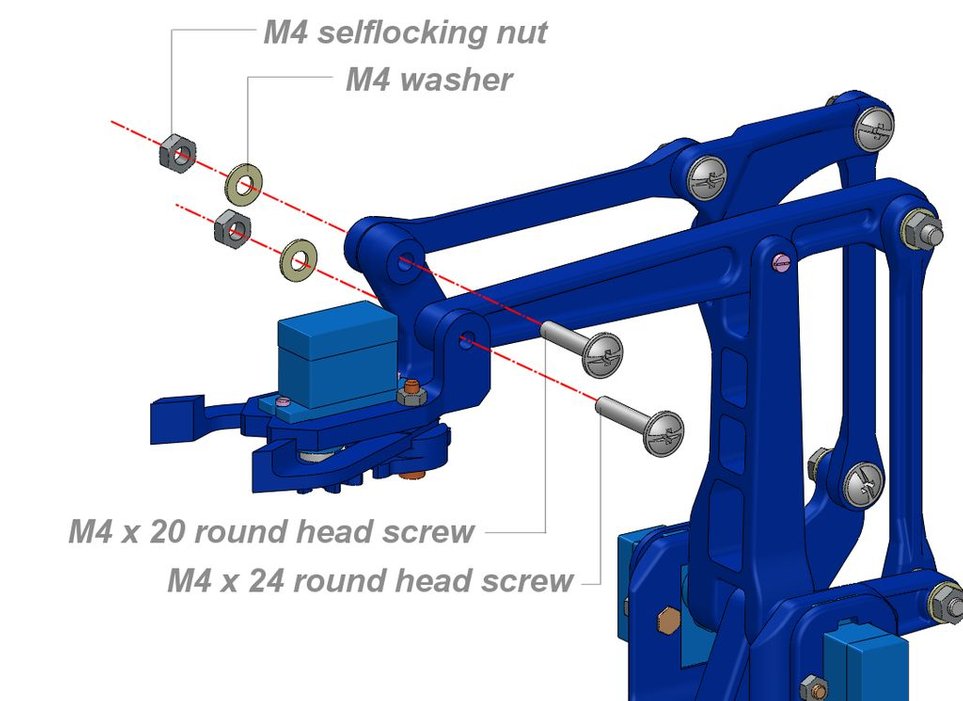
| پیچ M4*20 | 5 عدد | |
| پیچ M4*26 | 1 عدد | |
| پیچ M4*22 | 1 عدد | |
|
مهره ساده با قطر داخلی 4 میلیمتر |
10 عدد | |
|
مهره ساده فولادی با قطر داخلی 3 میلیمتر |
20 عدد | |
|
واشر تخت ساده استیل 3 میلی متر |
20 عدد | |
|
واشر تخت ساده استیل 4 میلی متر |
20 عدد |
نحوه ساخت مکانیک ربات
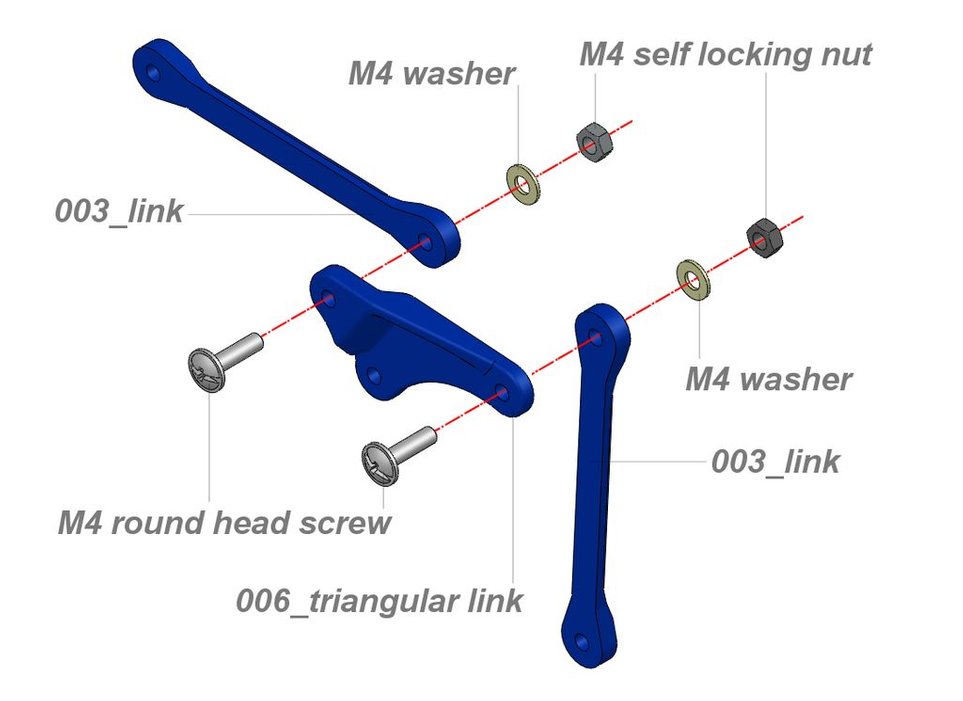
در گام اول، دو لینک شماره سه و لینک مثلثی شکل ربات را طبق تصویر ارائه شده به هم متصل میکنیم.
توجه شود که در طراحی تمامی این لینکها تمامی سوراخها به نحوی در نظر گرفته شده است که قابلیت استفاده از هر دو پیچ M3 و M4 را داشته باشند. برای این منظور کافی است تا با استفاده از ابزاری همچون کاتر این سوراخها را به اندازه مورد نظر تغییر اندازه دهید.
همچنین، در تمامی مراحل مهره تمامی پیچها به طور کامل بسته شده و در ادامه کار برای هر مفصل کافی است تا مهره آن را کمی باز کرده تا ربات حرکت نرم و منظمی داشته باشد.
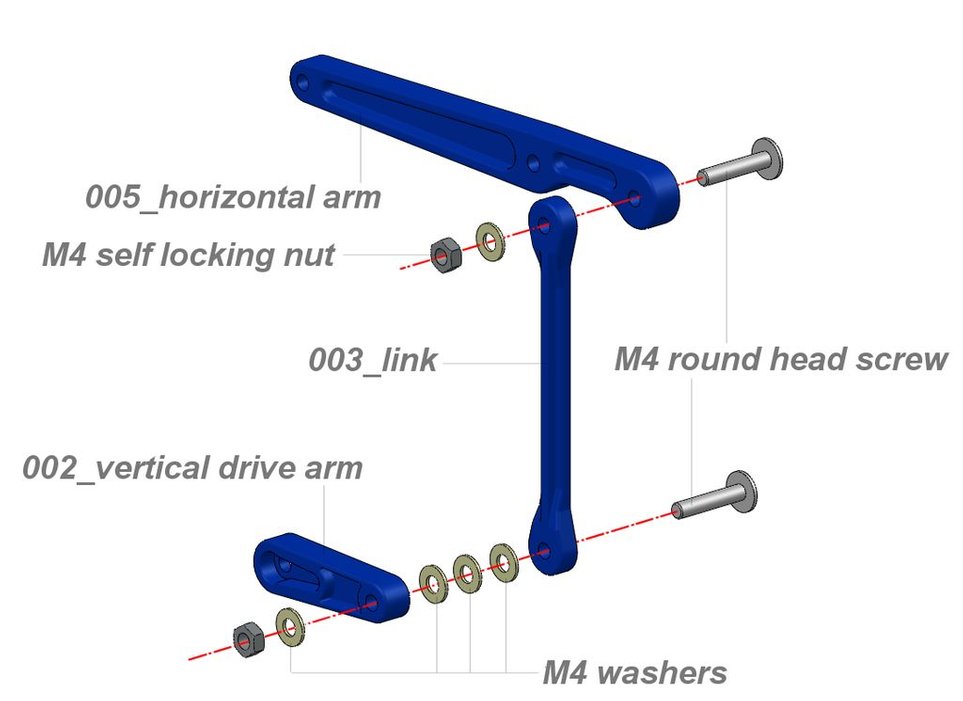
در گام دوم، طبق شکل، یک لینک شماره سه دیگر را به لینک افقی ربات متصل کرده و با پیچ و مهره و واشر اتصال را ثابت میکنیم. همانطور که در تصویر نمایش داده شده است در این گام قسمت پایین لینک شماره سه توسط سه واشر به لینک شماره دو که لینک عملگری ربات است متصل می شود. به این لینک در واقع یکی از موتورهای محرک ربات متصل میشود و به همین منظور به لینک عملگری ربات شناخته میشود.
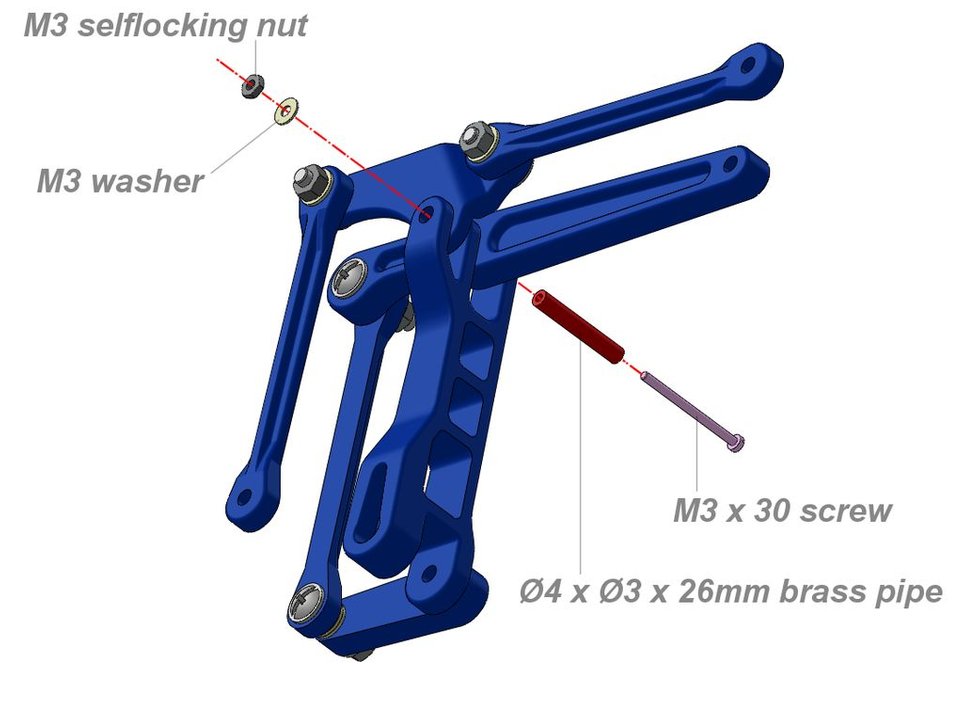
گام سوم: در این مرحله دو لینک مونتاژ شده در دو گام قبل به لینک شماره چهار یا لینک عمودی ربات وصل میشوند. برای این اتصال از پیچ بلندتری مانند پیچ M3*26-30 میتوانید استفاده کنید.
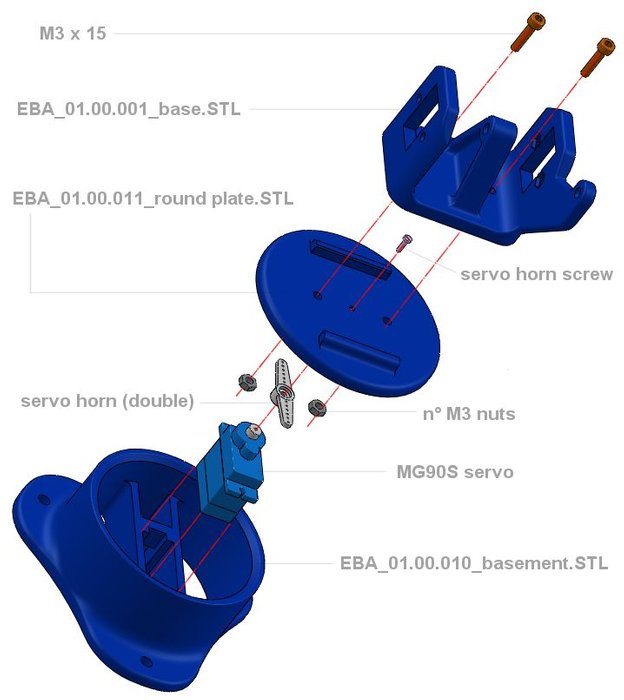
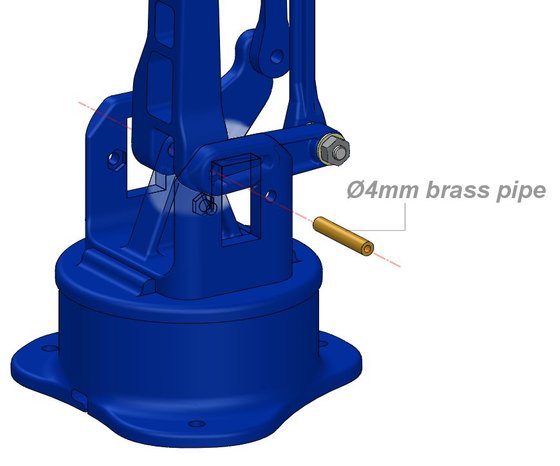
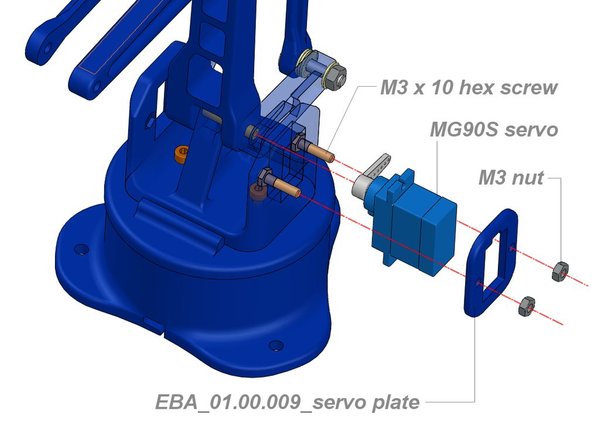
در ادامه به مونتاژ بیس ربات پرداخته میشود.
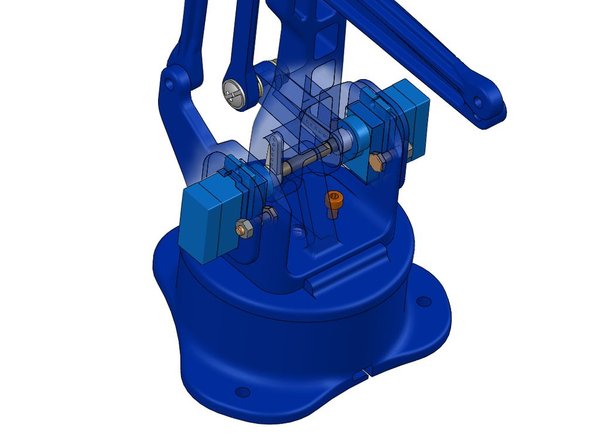
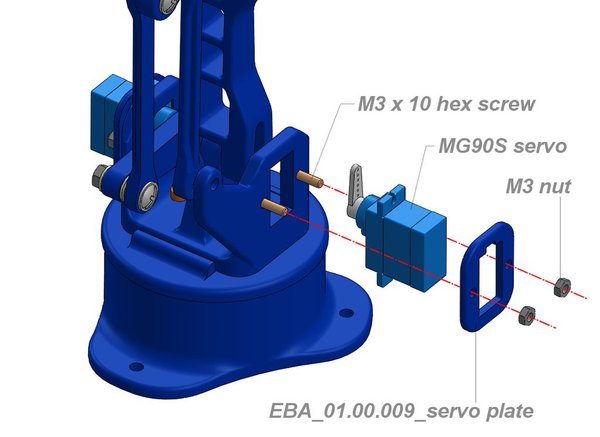
برای این منظور تمامی مراحل را مطابق شکل گذرانده و ابتدا میتوان سروو موتور را در محل خود قرار داد. توجه کنید در تمامی مراحل مناسب است تا سروو موتورها در زاویه صفر خود قرار داشته باشند تا از درجه آزادی عملگرها کاسته نشده و قابلیت حرکت لینک متصل آن به اندازه 90 درجه در هر سمت را داشته باشد.
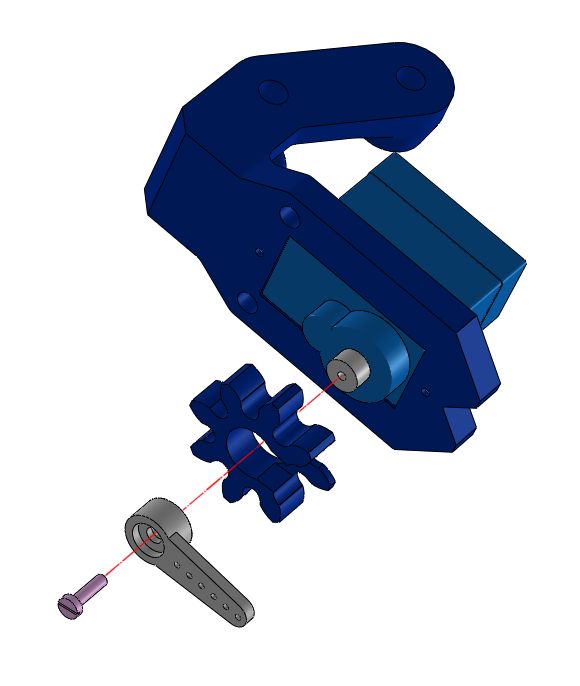
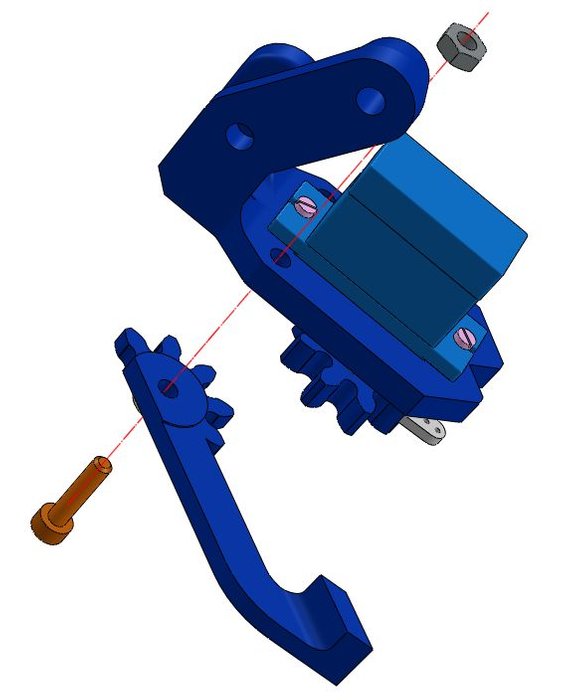
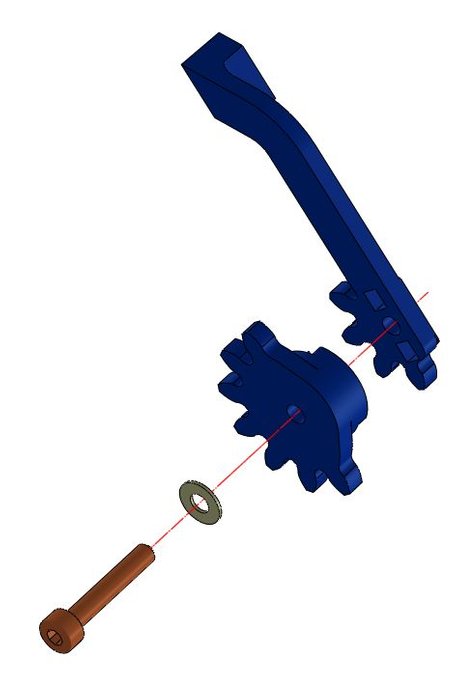
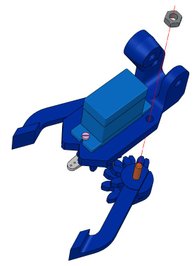
مونتاژ گریپر ربات:
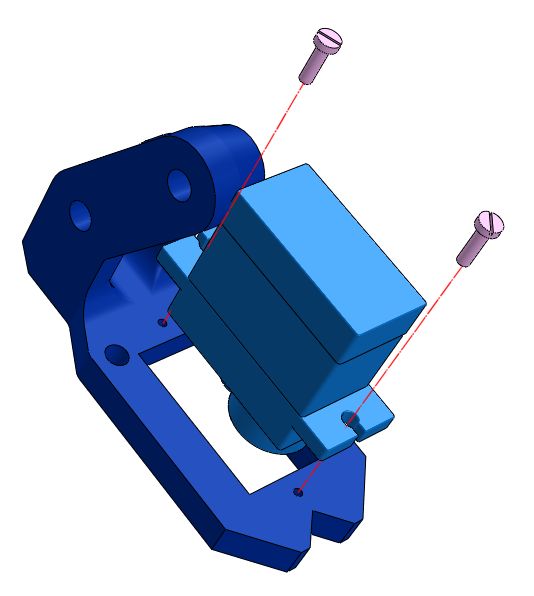
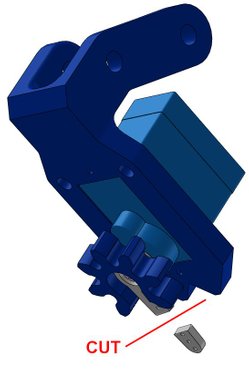
مونتاژ این قطعه را با مونتاژ سروو موتور آن و سپس هر یک از دهانههای گریپر مطابق شکلها انجام دهید.


در نهایت در ادامه سه قطعه مونتاژ شده بازو، بیس و گریپر باید بر روی یکدیگر سوار شوند.
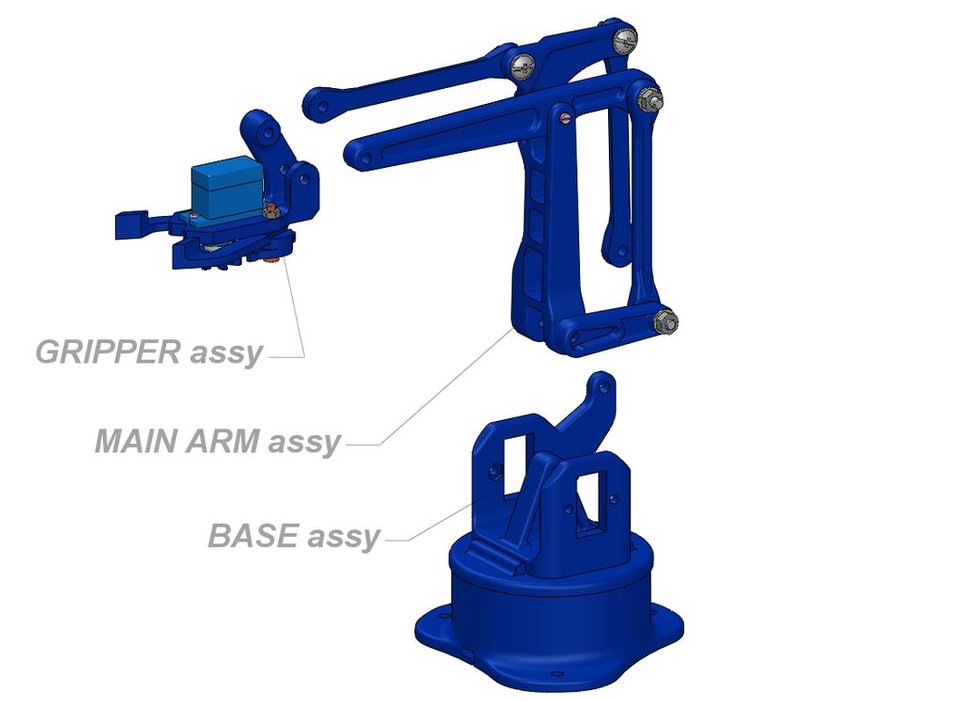
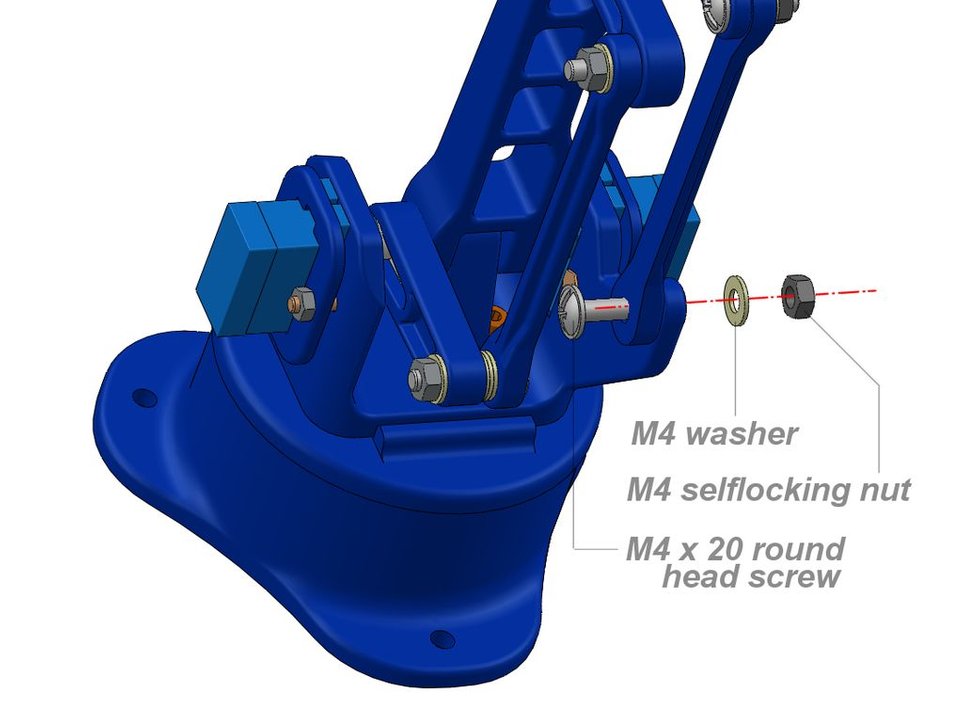
برای نسب بازو بر روی شانه و بیس ربات می توانید از پیچ بلند M3 و یا M4 استفاده کنید و برای اتصال میانی در بازوی ربات قرار دهید:

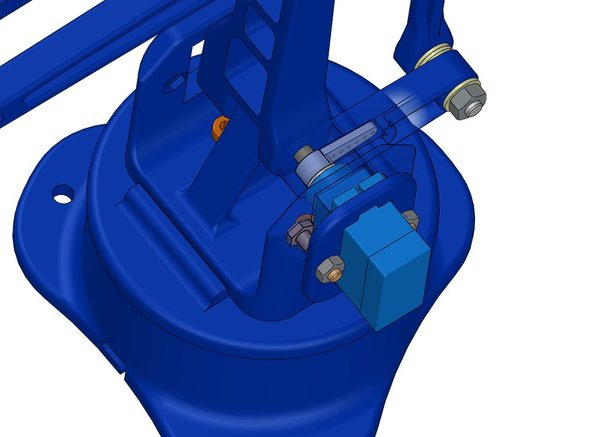
پس از این مرحله عملگرهای بازوی ربات را مطابق شکل در محل تعبیه شده برای آنها قرار داده و پیچ نهایی برای اتصال بازو به شانه ربات را میبندیم:
به همین ترتیب با دو عدد پیچ گریپر ربات نیز مطایق شکل نشان داده شده به بازوی ربات وصل میشود:
کنترل ربات
همانطور که بیان شد، برای کنترل این بازو می توانید از پتانسیومترها، جویاستیکها، کنترل از راه دور و روش های متنوع دیگر استفاده کنید که در اینجا روش کنترل راه دور و استفاده از بلوتوث استفاده میشود. برای این منظور پایه های ماژول HC-06 را به برد آردوینو Uno متصل میکنیم. پایه Ground و Vcc ماژول را به ترتیب به پایه زمین و 5 ولت برد وصل کنید. همچنین، طبق برنامه نوشته شده برای کنترل ربات که در پیوست این مطلب برای دانلود قرار داده شده است به ترتیب پایههای Tx و Rx ماژول را به پایه شماره 10 و 11 برد آردوینو وصل کنید.
همچنین، سیم سیگنال چهار موتور بازوی ربات را به ترتیب به پایه های شماره 3، 5، 6 و 9 برد آردوینو Uno وصل کرده و سیم های Ground و Vcc را به ترتیب به زمین و 5 ولت برد وصل نمایید تا با اجرا و آپلود برنامه در برد آردوینو Uno با نصب اپلیکیشن قرار داده شده در ادامه مطلب قابلیت کنترل ربات خود از طریق گوشیهای تلفن همراه را داشته باشید. کافی است تا پس از نصب اپلیکیشن و تغذیه برد، اتصال بلوتوث تلفن همراه خود را با ماژول HC-06 برقرار کرده تا بتوانید ربات را کنترل کنید.
دانلود کد آردوینو دانلود کتابخانههای مورد نیاز دانلود اپلیکیشن اندروید
فیلم آموزش ساخت بازو رباتیک کوچک
نظرات، پيشنهادات و انتقادات خود را براي بهتر شدن محتواي مطالب با ما در ميان بگذاريد...







نظرات (31)